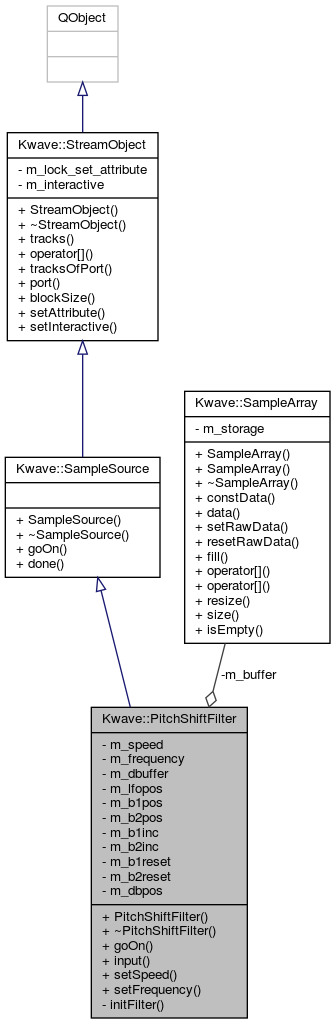
#include <PitchShiftFilter.h>

Public Slots | |
| void | input (Kwave::SampleArray data) |
| void | setSpeed (const QVariant speed) |
| void | setFrequency (const QVariant freq) |
Signals | |
| void | output (Kwave::SampleArray data) |
 Signals inherited from Kwave::StreamObject Signals inherited from Kwave::StreamObject | |
| void | attributeChanged (const QVariant value) |
Public Member Functions | |
| PitchShiftFilter () | |
| virtual | ~PitchShiftFilter () Q_DECL_OVERRIDE |
| virtual void | goOn () Q_DECL_OVERRIDE |
| Public Member Functions inherited from Kwave::SampleSource | |
| SampleSource (QObject *parent=Q_NULLPTR) | |
| virtual | ~SampleSource () |
| virtual bool | done () const |
| Public Member Functions inherited from Kwave::StreamObject | |
| StreamObject (QObject *parent=Q_NULLPTR) | |
| virtual | ~StreamObject () |
| virtual unsigned int | tracks () const |
| virtual Kwave::StreamObject * | operator[] (unsigned int track) |
| virtual unsigned int | tracksOfPort (const char *port) const |
| virtual Kwave::StreamObject * | port (const char *port, unsigned int track) |
| virtual unsigned int | blockSize () const |
| void | setAttribute (const char *attribute, const QVariant &value) |
Private Types | |
| enum | { MAXDELAY = 1000000 } |
Private Member Functions | |
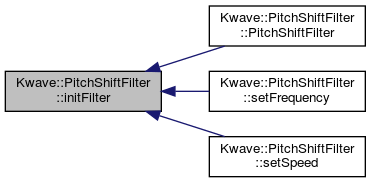
| void | initFilter () |
Private Attributes | |
| Kwave::SampleArray | m_buffer |
| float | m_speed |
| float | m_frequency |
| QVector< float > | m_dbuffer |
| float | m_lfopos |
| float | m_b1pos |
| float | m_b2pos |
| float | m_b1inc |
| float | m_b2inc |
| bool | m_b1reset |
| bool | m_b2reset |
| int | m_dbpos |
Additional Inherited Members | |
| Static Public Member Functions inherited from Kwave::StreamObject | |
| static void | setInteractive (bool interactive) |
Detailed Description
Definition at line 38 of file PitchShiftFilter.h.
Member Enumeration Documentation
◆ anonymous enum
|
private |
Constructor & Destructor Documentation
◆ PitchShiftFilter()
| Kwave::PitchShiftFilter::PitchShiftFilter | ( | ) |
Constructor
Definition at line 34 of file PitchShiftFilter.cpp.
References initFilter().

◆ ~PitchShiftFilter()
|
virtual |
Member Function Documentation
◆ goOn()
|
virtual |
does the calculation
Implements Kwave::SampleSource.
Definition at line 49 of file PitchShiftFilter.cpp.
References m_buffer, and output().
◆ initFilter()
|
private |
reset/initialize the filter and buffer
Definition at line 55 of file PitchShiftFilter.cpp.
References m_b1inc, m_b1pos, m_b2inc, m_b2pos, m_dbpos, m_dbuffer, m_lfopos, m_speed, and MAXDELAY.
Referenced by PitchShiftFilter(), setFrequency(), and setSpeed().
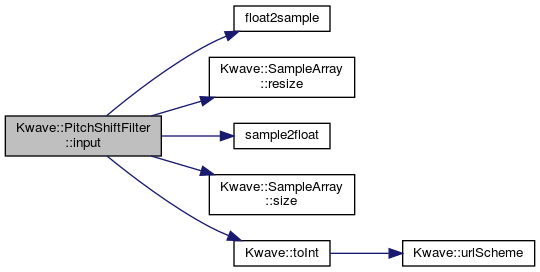
◆ input
|
slot |
receives input data
Definition at line 75 of file PitchShiftFilter.cpp.
References float2sample(), m_b1inc, m_b1pos, m_b1reset, m_b2inc, m_b2pos, m_b2reset, m_buffer, m_dbpos, m_dbuffer, m_frequency, m_lfopos, m_speed, MAXDELAY, Kwave::SampleArray::resize(), sample2float(), Kwave::SampleArray::size(), and Kwave::toInt().
◆ output
|
signal |
emits a block with the filtered data
Referenced by goOn().

◆ setFrequency
|
slot |
Sets the frequency parameter
- Parameters
-
freq the normed frequency
Definition at line 204 of file PitchShiftFilter.cpp.
References initFilter(), and m_frequency.

◆ setSpeed
|
slot |
Sets the speed factor
- Parameters
-
speed factor as a double
Definition at line 194 of file PitchShiftFilter.cpp.
References initFilter(), and m_speed.

Member Data Documentation
◆ m_b1inc
|
private |
Definition at line 96 of file PitchShiftFilter.h.
Referenced by initFilter(), and input().
◆ m_b1pos
|
private |
Definition at line 94 of file PitchShiftFilter.h.
Referenced by initFilter(), and input().
◆ m_b1reset
|
private |
Definition at line 98 of file PitchShiftFilter.h.
Referenced by input().
◆ m_b2inc
|
private |
Definition at line 97 of file PitchShiftFilter.h.
Referenced by initFilter(), and input().
◆ m_b2pos
|
private |
Definition at line 95 of file PitchShiftFilter.h.
Referenced by initFilter(), and input().
◆ m_b2reset
|
private |
Definition at line 99 of file PitchShiftFilter.h.
Referenced by input().
◆ m_buffer
|
private |
buffer for input
Definition at line 82 of file PitchShiftFilter.h.
◆ m_dbpos
|
private |
Definition at line 100 of file PitchShiftFilter.h.
Referenced by initFilter(), and input().
◆ m_dbuffer
|
private |
Definition at line 92 of file PitchShiftFilter.h.
Referenced by initFilter(), and input().
◆ m_frequency
|
private |
base frequency
Definition at line 88 of file PitchShiftFilter.h.
Referenced by input(), and setFrequency().
◆ m_lfopos
|
private |
Definition at line 93 of file PitchShiftFilter.h.
Referenced by initFilter(), and input().
◆ m_speed
|
private |
speed factor
Definition at line 85 of file PitchShiftFilter.h.
Referenced by initFilter(), input(), and setSpeed().
The documentation for this class was generated from the following files:
- plugins/pitch_shift/PitchShiftFilter.h
- plugins/pitch_shift/PitchShiftFilter.cpp
